ZLTECH Nema23 Encoder CANopen integrierter Schrittservomotor










Integrierte Motorkennlinie
1. Die Verdrahtung wird vereinfacht.
CANopen-Buskommunikationssteuerung, mehrere Motoren können über einen Buskommunikationsport angeschlossen werden, und die Treiber müssen nur miteinander verbunden werden, um den Verdrahtungsaufwand zu reduzieren.
2. Die Kommunikationsgeschwindigkeit ist schnell.
Der serielle Doppelleitungs-Kommunikationsmodus wird übernommen.Das Kommunikationsmedium kann Twisted-Pair, Koaxialkabel oder Glasfaser sein, und die Kommunikationsrate kann 1 MB/s erreichen.
3. Hohe Übertragungsgenauigkeit, hohe Zuverlässigkeit und stärkere Entstörungsfähigkeit.
Die kurze Rahmenstruktur wird übernommen.Die Anzahl der effektiven Bytes in jedem Frame beträgt 8. Die 8 Bytes belegen den Bus nicht zu lange, wodurch die Echtzeitkommunikation sichergestellt wird.Die Wahrscheinlichkeit von Interferenzen ist geringer, und die Neuübertragungszeit ist kürzer.
4. Niedrige Kosten und hohe Anwendbarkeit.
Das kostengünstige CANOPEN-Modul ist fast auf den heute gängigen Chips zu sehen.Die meisten MCUs unterstützen CAN-Peripherie, das auch als das am weitesten verbreitete Feldbusmodul in Europa und anderen Ländern bekannt ist.
5. Die Fehlerbehandlungs- und Erkennungsmechanismen sind zuverlässig.
Im Falle eines schwerwiegenden Fehlers hat der Knoten die Funktion, den Bus automatisch zu verlassen.Nachdem die gesendeten Informationen beschädigt wurden, können sie automatisch erneut übertragen werden.Die Crc-Inspektion wird übernommen und die entsprechende Fehlerbehandlungsfunktion wird bereitgestellt, um die Zuverlässigkeit der Datenkommunikation sicherzustellen.
Parameter
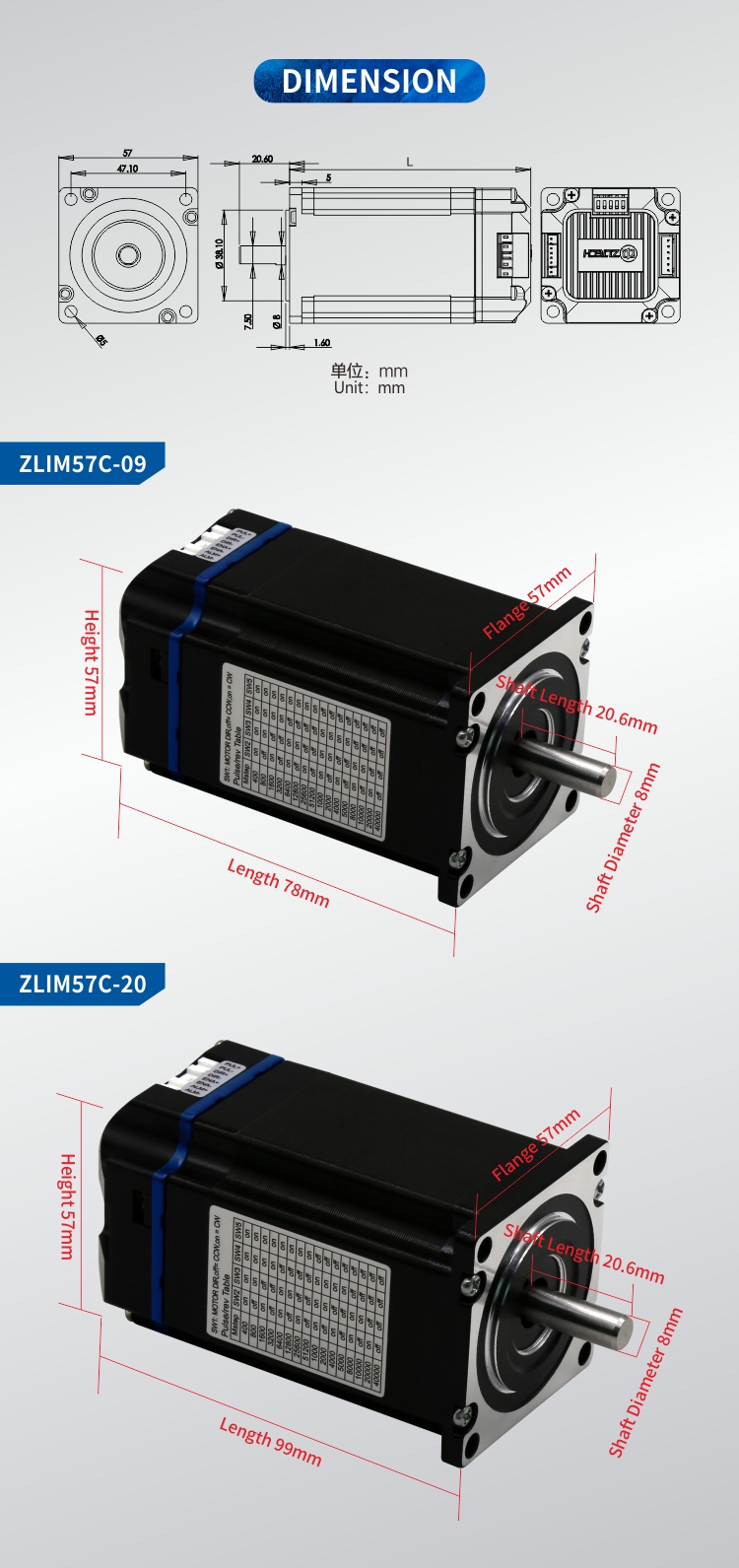
| Motorgesamtlänge (mm) | 99.1 | 120.1 |
| ÖFFNEN KÖNNEN | ZLIM57C-09 | ZLIM57C-20 |
| Welle | Einzelne Welle | Einzelne Welle |
| Größe | Nema23 | Nema23 |
| Schrittwinkel | 1,8° | 1,8° |
| Eingangsspannung (VDC) | 18-28 | 18-28 |
| Ausgangsstromspitze (A) | 3 | 3 |
| Schrittsignalfrequenz (Hz) | 200.000 | 200.000 |
| Steuersignaleingangsstrom (mA) | 10 | 10 |
| Überspannungsschutz (VDC) | 55 | 55 |
| Eingangssignalspannung (VDC) | 5 | 5 |
| Wellendurchmesser (mm) | 8 | 8 |
| Schaftlänge (mm) | 20.6 | 20.6 |
| Haltemoment (Nm) | 0,9 | 2 |
| Geschwindigkeit (RPM) | 2000 | 2000 |
| Encoder | / | / |
| Isolationswiderstand (MΩ) | 100 | 100 |
| Betriebstemperatur (℃) | 0~50 | 0~50 |
| max.Umgebungsfeuchtigkeit | 90 % relative Luftfeuchtigkeit | 90 % relative Luftfeuchtigkeit |
| Lagertemperatur (℃) | -10~70 | -10~70 |
| Vibration | 10~55 Hz/0,15 mm | 10~55 Hz/0,15 mm |
| Gewicht (g) | 1130 | 1130 |
| Motorlänge (mm) | 78.5 | 99,5 |
| Motorgesamtlänge (mm) | 99.1 | 120.1 |
| Encoder | / | / |
Abmessungen
Anwendung

Verpackung

Produktions- und Inspektionsgerät

Qualifikation & Zertifizierung

Büro & Fabrik
Zusammenarbeit

Produktkategorien
-

ZLTECH 24V-48V 10A Modbus RS485 DC bürstenloser Motor ...
-

ZLTECH 57mm Nema23 24VDC 1000-Wrie Closed Loop ...
-

ZLTECH 24V-48V 30A Modbus RS485 DC bürstenloser Dr ...
-

ZLTECH 2-Phasen-Nema23 24-36VDC Closed-Loop-Schritt ...
-
ZLTECH Nema17 42mm 2 Phasen 0,72Nm DC 24V 2A St...
-

ZLTECH 2 Phasen Nema34 4,5 Nm 24 V DC Schrittmotor ...





