ZLTECH Nema23 integrierter Schrittmotor mit geschlossenem Regelkreis für CNC










Umriss
ZLIS42 ist ein 2-Phasen-Hybrid-Schrittservomotor mit leistungsstarkem digitalem integriertem Antrieb.Das System hat einen einfachen Aufbau und eine hohe Integration. Diese Serie integrierter Closed-Loop-Schrittmotoren verwendet den neuesten dedizierten 32-Bit-DSP-Chip für die Motorsteuerung und verwendet fortschrittliche digitale Filtersteuerungstechnologie, Resonanzvibrationsunterdrückungstechnologie und präzise Stromsteuerungstechnologie, um den Zweiphasen-Hybrid-Schrittmotor zu erreichen präziser und stabiler Betrieb . Diese Serie integrierter Schrittmotoren mit geschlossenem Regelkreis zeichnet sich durch hohe Drehmomentabgabe, geringe Geräuschentwicklung, geringe Vibration und geringe Wärmeentwicklung aus und eignet sich besonders für elektronische Verarbeitungsgeräte, Laserbearbeitung, medizinische und kleine numerische Steuerungsgeräte.
Merkmale
1.Full Closed-Loop-Steuerung, kein Schrittverlust;
2.Low Vibration und Lärm;
3. Maximal 512 Mikroschritt-Unterteilung, minimale Einheit 2;
4. Eingangsspannung: 18 V-36 VDC;
5.3 isolierte Differenzsignaleingänge: 3,3-24 VDC;
6.1 isolierter Ausgang: Alarmausgang, OC;
7. Die Stromregelung ist glatt und genau, und der Motor hat eine geringe Wärmeentwicklung;
8.4 DIP-Schalterauswahl, 16-Segment-Schrittauflösung;
9.Mit Überspannung, Überstrom, außerhalb der Toleranz schützen Funktion usw.;
10.Mit eingebautem 1000-Draht-Magnet-Encoder, bietet Echtzeit-Feedback des Motorlaufzustands.
Vorteil
Kleines Volumen, hohe Kostenleistung, geringe Ausfallrate, ohne passenden Motor und Antriebsregler, eine Vielzahl von Steuermodi (optional) Impuls- und CAN-Bus, einfach zu bedienen, Systemdesign und Wartung sind bequem, groß |um die Produktentwicklungszeit zu verkürzen.
Der Schrittmotor kann ein elektrisches Impulssignal in eine Winkel- oder Linearverschiebung umwandeln.Im Nennleistungsbereich hängt die Drehzahl des Motors nur von der Frequenz und Impulszahl des Impulssignals ab und wird nicht durch die Laständerung beeinflusst, verbunden mit den Eigenschaften des kleinen kumulativen Fehlers des Schrittmotors, was es einfacher macht um die Geschwindigkeit, Position und andere Felder mit dem Schrittmotor zu steuern.Schrittmotoren werden in drei Arten unterteilt, der Hybrid-Schrittmotor ist derzeit weit verbreitet.
Parameter
| Artikel | ZLIS42-05 | ZLIS42-07 |
| Welle | Einzelne Welle | Einzelne Welle |
| Größe | Nema17 | Nema17 |
| Schrittwinkel | 1,8° | 1,8° |
| Eingangsspannung (VDC) | 18-36 | 18-36 |
| Ausgangsstromspitze (A) | 1.2 | 1.2 |
| Schrittsignalfrequenz (Hz) | 200.000 | 200.000 |
| Steuersignaleingangsstrom (mA) | 10 | 10 |
| Überspannungsschutz (VDC) | 29 | 29 |
| Eingangssignalspannung (VDC) | 5 | 5 |
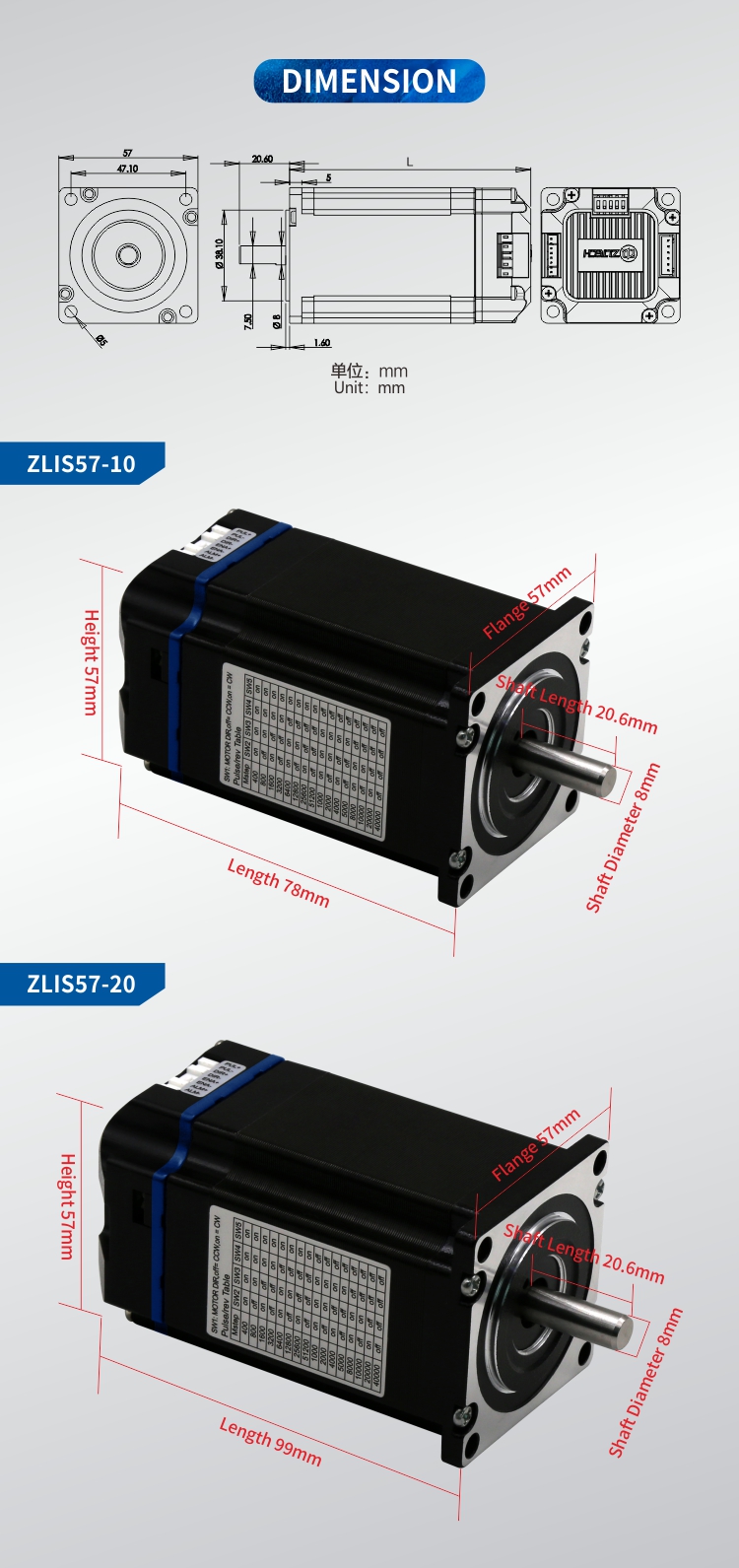
| Wellendurchmesser (mm) | 5/8 | 5/8 |
| Schaftlänge (mm) | 24 | 24 |
| Haltemoment (Nm) | 0,5 | 0,7 |
| Geschwindigkeit (RPM) | 2500 | 2500 |
| Encoder | 2500-Draht magnetisch | 2500-Draht magnetisch |
| Isolationswiderstand (MΩ) | 100 | 100 |
| Betriebstemperatur (℃) | 0~50 | 0~50 |
| max.Umgebungsfeuchtigkeit | 90 % relative Luftfeuchtigkeit | 90 % relative Luftfeuchtigkeit |
| Lagertemperatur (℃) | -10~70 | -10~70 |
| Vibration | 10~55 Hz/0,15 mm | 10~55 Hz/0,15 mm |
| Gewicht (g) | 430 | 430 |
| Motorlänge (mm) | 70 | 82 |
| Motorgesamtlänge (mm) | 94 | 106 |
Abmessungen
Anwendung

Verpackung

Produktions- und Inspektionsgerät

Qualifikation & Zertifizierung

Büro & Fabrik
Zusammenarbeit

Produktkategorien
-

2S86 ZLTECH 86 Serie DC 36V 48V AC 27V-75V clo ...
-

ZLTECH 80mm 48V 750W/1000W 3000RPM DC bürstenlos...
-

ZLTECH 13 Zoll Radmotor mit Luftbereifung ...
-

ZLTECH 8 Zoll 36 V 48 V 250 W 4 Nm 100 kg Einzelwelle ...
-

ZLTECH 24V-48V DC 15A nicht-induktiver bürstenloser M ...
-

ZLTECH 42mm 24V 1.5A 0.5Nm CANopen integriert ...





